
 |
Milan IkitsMAKO Surgical Corp Ph.D. in Computer Science, 2007 Dissertation Title: Interactive Exploration of Volumetric Data Sets With a Combined Visual and Haptic Interface Advisor: Charles D. Hansen |
Milan Ikits is the focus of this quarter's SCI Alumni Highlight. Milan worked with Chuck Hansen at the SCI Institute, where he received his Ph.D. in 2007. His dissertation focused on the development and evaluation of interactive visualization methods that combine 3-D graphical and haptic displays for the exploration of volumetric data sets. He also collaborated with Claudio T. Silva on GPU-assisted rendering of unstructured volume data. Milan is a major contributor to the popular OpenGL Extension Wrangler library, which he started while working at the SCI Institute.
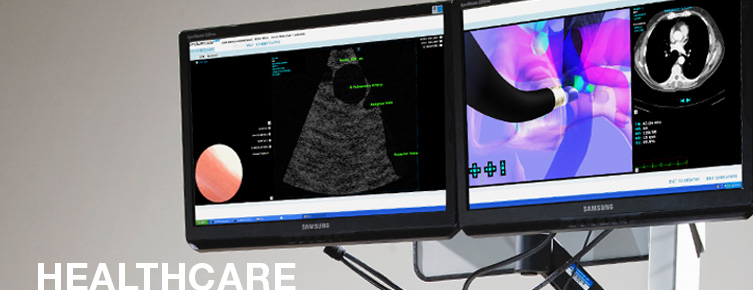
After finishing his dissertation research, Milan joined Immersion Medical, now CAE Healthcare, where he developed computational and visualization methods for hands-on training solutions of endovascular, endoscopic, and laparoscopic surgical procedures. One of these methods, described here and here, is based on a 3-D finite-element model for simulating the motion of coaxial catheter systems in coronary and carotid angioplasty and stenting procedures. A particular challenge in catheter simulation is maintaining several hundred Hz update rates for capturing a wide range of dynamic behavior and dealing with complex collision and contact scenarios inside the associated vascular networks. Another technique, described here, can be used to generate cross-sectional ultrasound images from dynamic anatomical models at interactive rates.
More recently, Milan joined MAKO Surgical Corp. where he has worked on visualization and implant-planning solutions for a robot-assisted orthopedic surgery application. MAKO's RIO® robotic arm technology provides the surgeon a patient-specific 3-D model that the surgeon uses for planning a partial knee or hip joint replacement procedure. During surgery, tactile, visual, and auditory feedback assists the surgeon in preparing the bone and placing the implants in the desired orientation.
 |
 |
| CAE LaparoscopyVR surgical simulator | MAKOplasty Robot and Application |
 |
|
| CAE Endoscopy VR simulator | |