Lines of Code
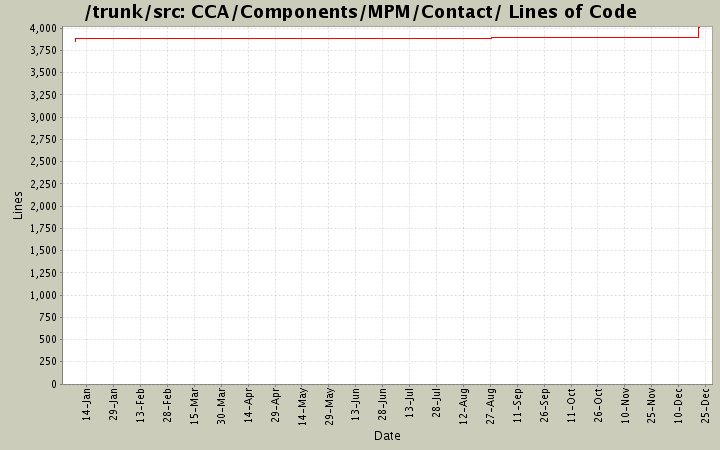
[root]/CCA/Components/MPM/Contact
| Author | Changes | Lines of Code | Lines per Change |
|---|---|---|---|
| Totals | 51 (100.0%) | 206 (100.0%) | 4.0 |
| guilkey | 11 (21.6%) | 182 (88.3%) | 16.5 |
| jas | 39 (76.5%) | 23 (11.2%) | 0.5 |
| jsutherland | 1 (2.0%) | 1 (0.5%) | 1.0 |
Modification so the RT will run. The problem, allocateAndPutting a variable
that wasn't computed. I thought we used to issue errors or warnings about
that?
0 lines of code changed in 2 files:
Add the option to apply contact in a direction that is normal to the surface
of an arbitrarily oriented rigid body.
To use, along with "rigid" or "specified" or "specified_velocity" (all
different names for the same model) include:
<normal_only>true</normal_only>
in the contact section of the input file. This flag is false by default.
When set to true, the <direction> tag will be ignored.
127 lines of code changed in 3 files:
Tidying and a bit of code rearranging. Might help performance a wee bit,
will help readability at least as much.
0 lines of code changed in 2 files:
Update copyright year.
23 lines of code changed in 39 files:
Set symmetry boundary conditions on the interpolated velocity AFTER applying contact.
This will probably change some answers (for the better!) in the RT.
9 lines of code changed in 1 file:
Eliminate "using namespace std" and similar from header files. That is a big no-no!
1 lines of code changed in 1 file:
Delete z_matl, this should fix the memory leak.
3 lines of code changed in 1 file:
Added the option of applying a volume constraint to simulations involving
SpecifiedBody (Rigid) contact. Syntax is the same as friction contact:
<volume_constraint>X.YZ</volume_constraint>, where X.YZ is a number in the
range [0-1].
43 lines of code changed in 2 files: