|
|
|
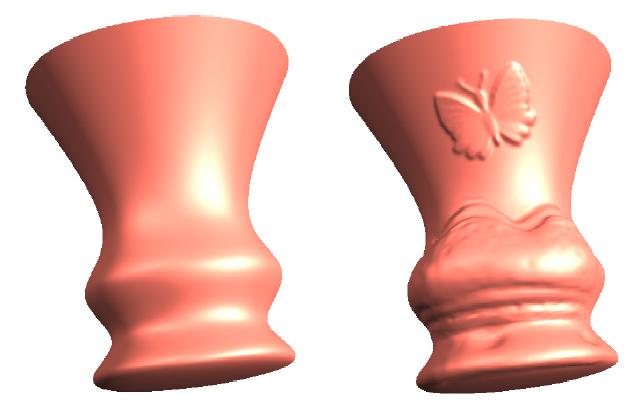
Example of pasting from the Biermann
paper. |
|
|
|
Example of pasting from the Biermann
paper. |
Abe Stephens and Won-Ki
Jeong
CS-6620 Final Project Spring 2004.
(c) 2004
Scientific Computing and Imaging Institute
Salt Lake City.
Based on the papers:
Cut-and-Paste
Editing of Multiresolution Subdivision Surfaces. Henning
Biermann, Ioana Martin, Fausto Bernardini, Denis Zorin. ACM
Transactions on Graphics, vol 21, Number 3, Proceedings of ACM
Siggraph, pages 312-321, July 2002. (PDF)
Least
Squares Conformal Maps for Automatic Texture Atlas Generation. Bruno
Lévy, Sylvain Petitjean, Nicolas Ray, Jerome Maillot.
ACM Transactions on Graphics, vol 21, Number 3,
Proceedings of ACM Siggraph, Pages: 362 - 371
July 2002. (PDF)
This project implements cut-and-paste editing of
surfaces. Both the input and output mesh are multiresolution
subdivision surfaces that are defined as a base mesh with detail
offsets. After the user specifies regions to cut and to paste, the
base and detail surfaces on both source and target surfaces are split
and base surfaces are parameterized into a common domain.Detail
offsets from the source detail surface are copied and transferred to
the target surface.
This project resembles a boxed set of
recent SIGGRAPH achievements. The basis of the mesh data
structure is from Interactive Multiresolution Mesh Editing by
Zorin et al (SIG '97), which proposed multiresolution subdivision
surface based on Loop subdivision and Laplacian smoothing.
Parameterization, one of the most active research fields, is the main
technique used for copying details from one surface to the other.
Here we are borrowing a subset of the techniques presented in Least
Squares Conformal Maps for Automatic Texture Atlas Generation,
Levy et. al. (SIG'02). Implementing least-squares subdivision surface
fitting and calculating geodesic distance on the surface is also
required.
The motivation for choosing this project is that it
would be one of the useful extension of what we have done in the
class. We have implemented half-edge mesh class, simplification
algorithm, and subdivision algorithm- which can be extended to
multiresolution mesh structure with reasonable efforts. In addition,
cut-and-pasting editing on triangle meshes would not only be
intersting but also be useful for the future research.
Our multiresolution mesh is
based on a half-edge triangle mesh data structure and Loop
subdivision. For each subdivision level, newly created vertices,
faces, and edges are stored along with detail vectors captured with
respect to a local coordinate frame defined on each vertex. Switching
between levels either validates or invalidates triangles, edges, or
vertices. Since triangles and edges from different levels do not
overlap, adjacent information stored in them can be preserved.
However, the adjacent edge for each vertex is changed between
different level because the vertices from lower levels may be used in
the higher ones. This requires storing additional adjacent edge
information for each vertex.
The multi-resolution analysis
operation is performed by downsampling the mesh and sampling detail
vectors. As in Zorin et al (SIG '97), we use Taubin's non-shrinking
Laplacian smoothing as a pseudo inverse of Loop subdivision.
Downsampling performs Laplacian smoothing, and detail vectors are
captured as difference between the current mesh and subdivided
downsampled mesh.
Downsampling : M^k-1 =
smooth(M^k)
Detail Sampling : D(M^k) =
F^t(M^k-subd(M^(k-1))
(M^k : level k mesh, D(M) :
detail vector for mesh M, F^t : inverse of local
transformation)
Because adjacent edge of each vertex is stored
explicitly the local coordinate frame is calculated by adjacent edge
e, vertex normal n, and cross product of e and n. The synthesis
operation is simply to subdivide and add detail vectors. Currently
adaptive analysis or synthesis is not supported.
Parameterization of both
the source and target surfaces was implemented using the least squares
conformal map technique from (2). Selecting a region to
parameterize and normalizing the size of the parameterization ended up
being two unforseen challenges in the implementation, performing the
parameterization was very straight forward. Region selection was
acomplished by allowing the user to click a series of verticies on the
surface of the source mesh. These verticies are connected using
Dijkstra's algorithm to find the shortest path between each selected
pair. This method is somewhat unpredictable, we used total edge length
as a metric in the shortest path algorthm, as a result often the user
would be suprised after selecting two verticies and finding that the
shortest path of edges did not follow their intended path.
The original author's multiresolution data structure allowed them to
quickly match the resolution of the source and target meshes. Our
implementation used subdivision to compute detail vectors on the source
surface but we did not implement any facility for matching the
resolution of the source and target surfaces. This resulted in aliasing
problems when sampling detail from a fine mesh on to a coarse one.
Once a user selects a source region, the corresponding target region has to be found. We use "Geodesic Walking" to find a region on the target surface. The selected source region is parameterized into a 2D domain, and the center of the region in 2D can be found by the average of boundary vertices of that region. We can connect the center to every vertex on the region boundary to make a set of line segments, and each line segment can be parameterized by the angle from the previous line segment (0 for the first line segment) and the distance from the center. Then we can find a corresponding curves on on the target surface by walking on the surface along the direction and the distance. Distances measured on the parameter domain are relative distances, which means we can zoom in/out on the target surface by uniformly scaling the distances on the 3D.
To map a line segment on 2D
parameter space to a curve on the 3D target surface, we need a way to
walk on the surface along the given direction with the distance. Once a
start point and a direction is given, then we find a surface normal on
the point and build a plane that encloses the point, normal vector, and
the direction vector. Then we find the intersection between the plane
and the surface until its length reaches the given value (distance).
Since our mesh is piecewise-linear triangular mesh, we approximate
plane-surface intersection by plane-triangle intersection. For each
intersected triangle, a starting point is given on the edge, and its
surface normal is approximated by the average of the end vertex normals
of that edge. Then the curve on the surface is approximated by the set
of line segments, and the distance of the curve is the sum of the
length of each line segment. Once the target region is found, then it
is parameterized onto the common domain where source region is
parameterized, and surface detail is transferred between two meshes.
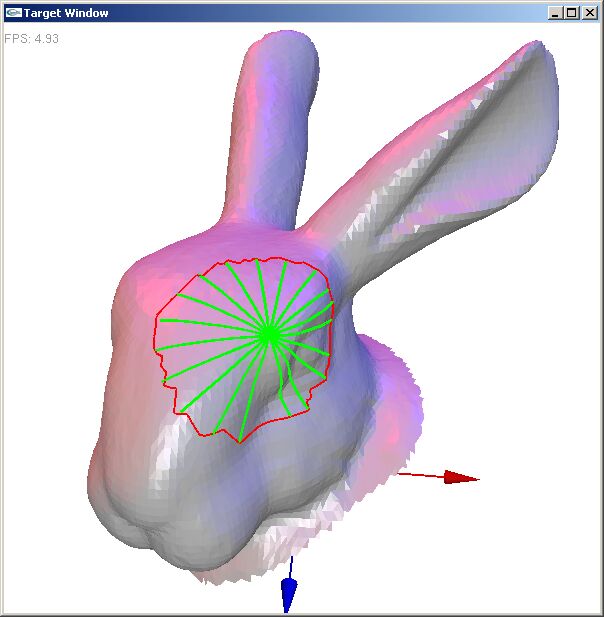
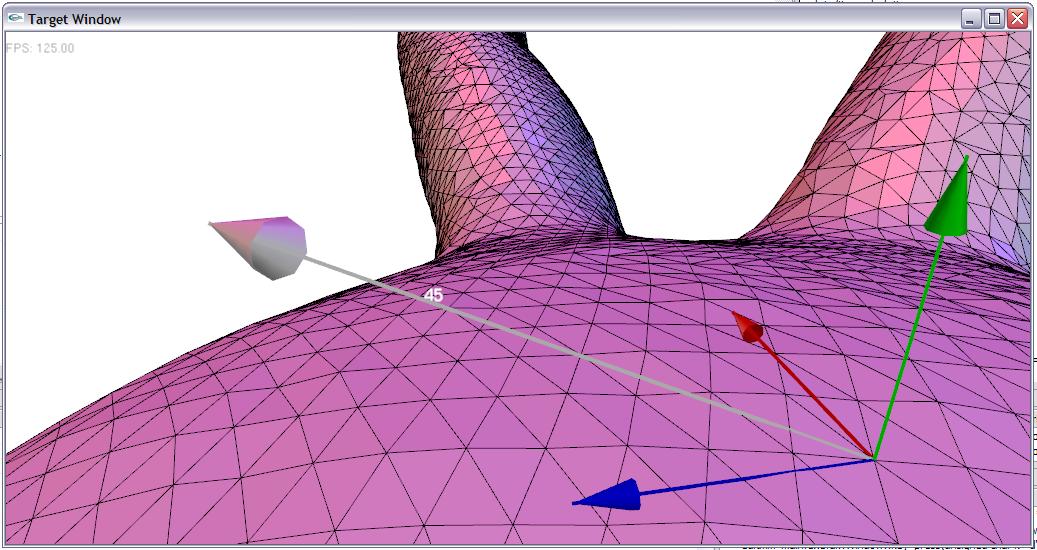
Fig. Target region
selection by Geodesic walking on the surface
Transfering detail vectors
from the source to the target surface is the final stage in the copy
and paste process. It consists of the three following steps:
|
|
|
|
|
|
|
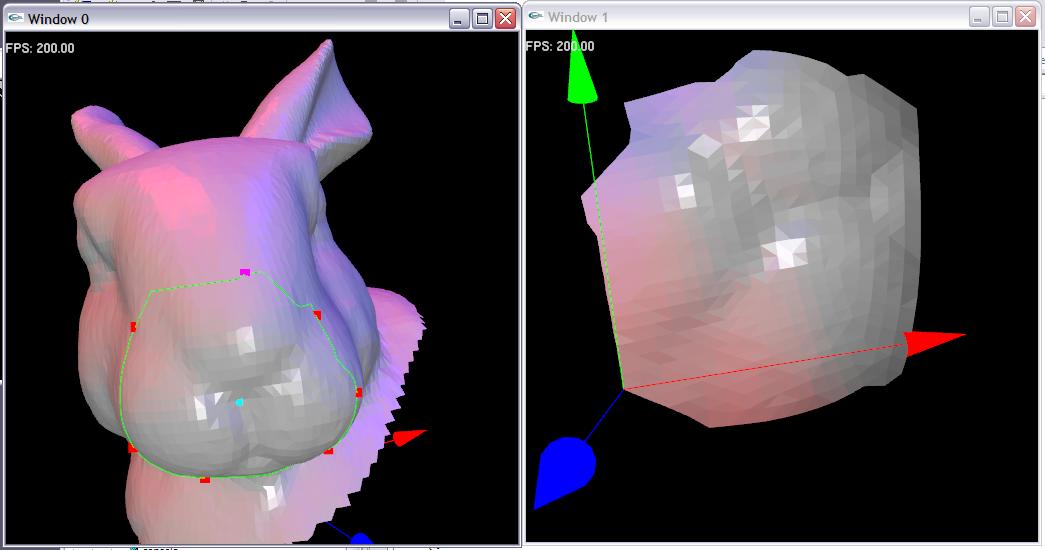
Building a widget for target region selection and orientation. |
|
|
|
Early output problems.
|
|
|
|
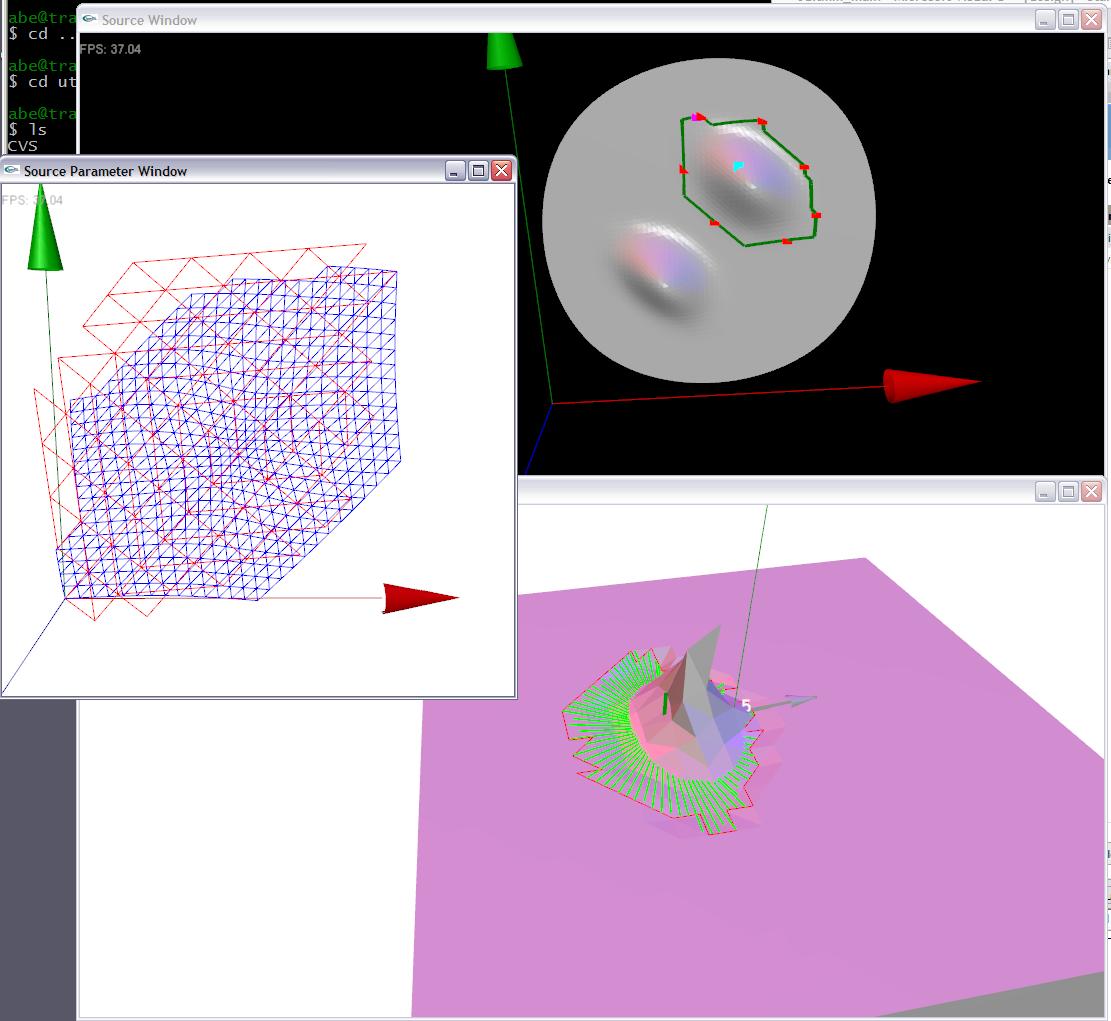
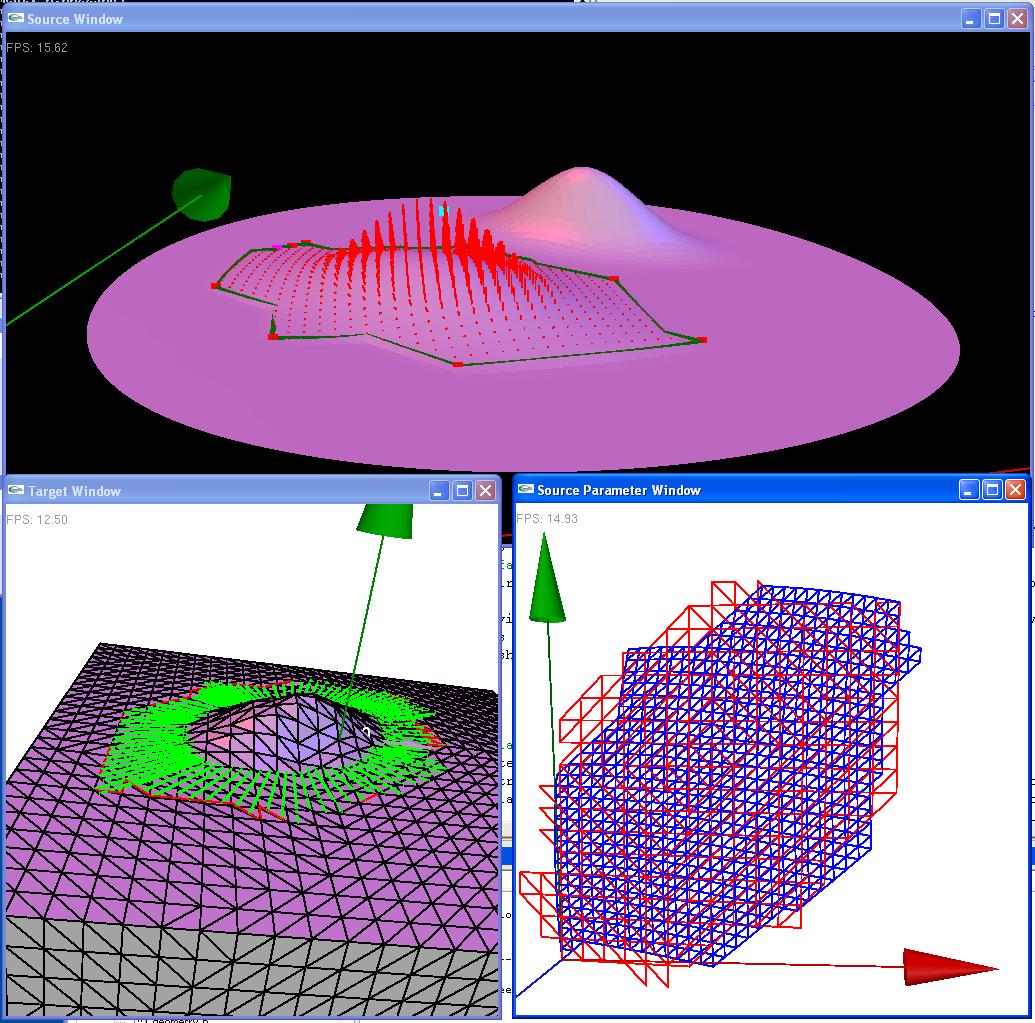
Final output. The red vectors in the upper
window indicate the sampled detail vectors. |
Set source and target mesh variables and load commands in editmm_window0.txt and editmm_window2.txt.
Execute the program.
Press 't' on the Source window.
Click a border on the source mesh. Take care that the border does not self intersect.
Click the center of the selected region.
Issue "base" command.
Press '>' or '<' to build base detail vectors.
Press 'n' when finished.
Issue "param"
Move the Source Param window to view the result.
Press 'w' in the source param window to enable wireframe.
Issue "target" in the target window.
Click the target mesh and select a point.
Use '<' '>' '-' and '+' to orientate and scale the target region selection.
Press 'd' when finished.
Issue Param <targetfile.m>
View result in Parameter window.
Issue "detail" in target window.
Total project size was
23999 lines of code.